



Your cart is empty.

- Quick View
- Choose Options
Mini GPS uBlox MAX M10S
$70.90

BEST SELLERS
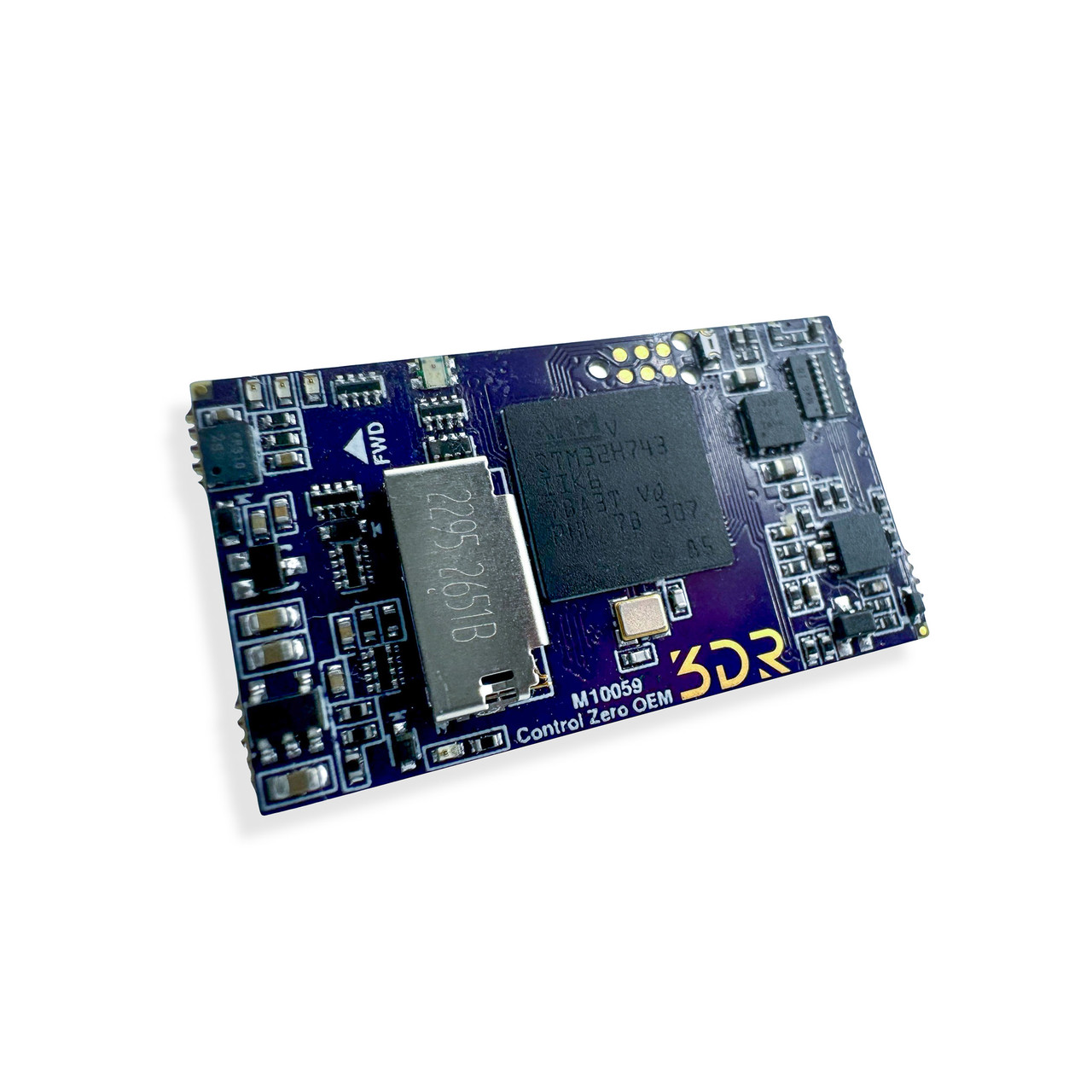
Ardupilot and PX4
Fully compatible with the most widely used open-source software.







Exclusive Offers for Educators
Are you part of an educational program?
Equip your students with top-quality, American-made, NDAA-compliant components.
Advanced Engineering Solutions

Need Custom Solutions?
Connect with our elite engineers, specializing in high-value collaborations and consultancy for industry and government projects.
Our expertise in pioneering autonomous technologies positions us to meet the demands of large-scale, sophisticated initiatives.
Engage with us for solutions that drive progress and redefine possibilities.


Join the Flight Crew: Connect, Collaborate, and Soar in our 3DR Discord Community!